# 飞书机器人触发器
通过可视化编排的方式,实现在钉钉机器人上实现指令触发功能,输入指令后会触发工作流执行,从而实现指令功能交互,即使不会Python开发也可以快速开发实现一个指令机器人。

# 入参
# 创建钉钉应用凭据
# Client ID和Client Secret
点击【凭据管理】菜单,点击【添加凭据】按钮,下拉选择【钉钉应用】类型。
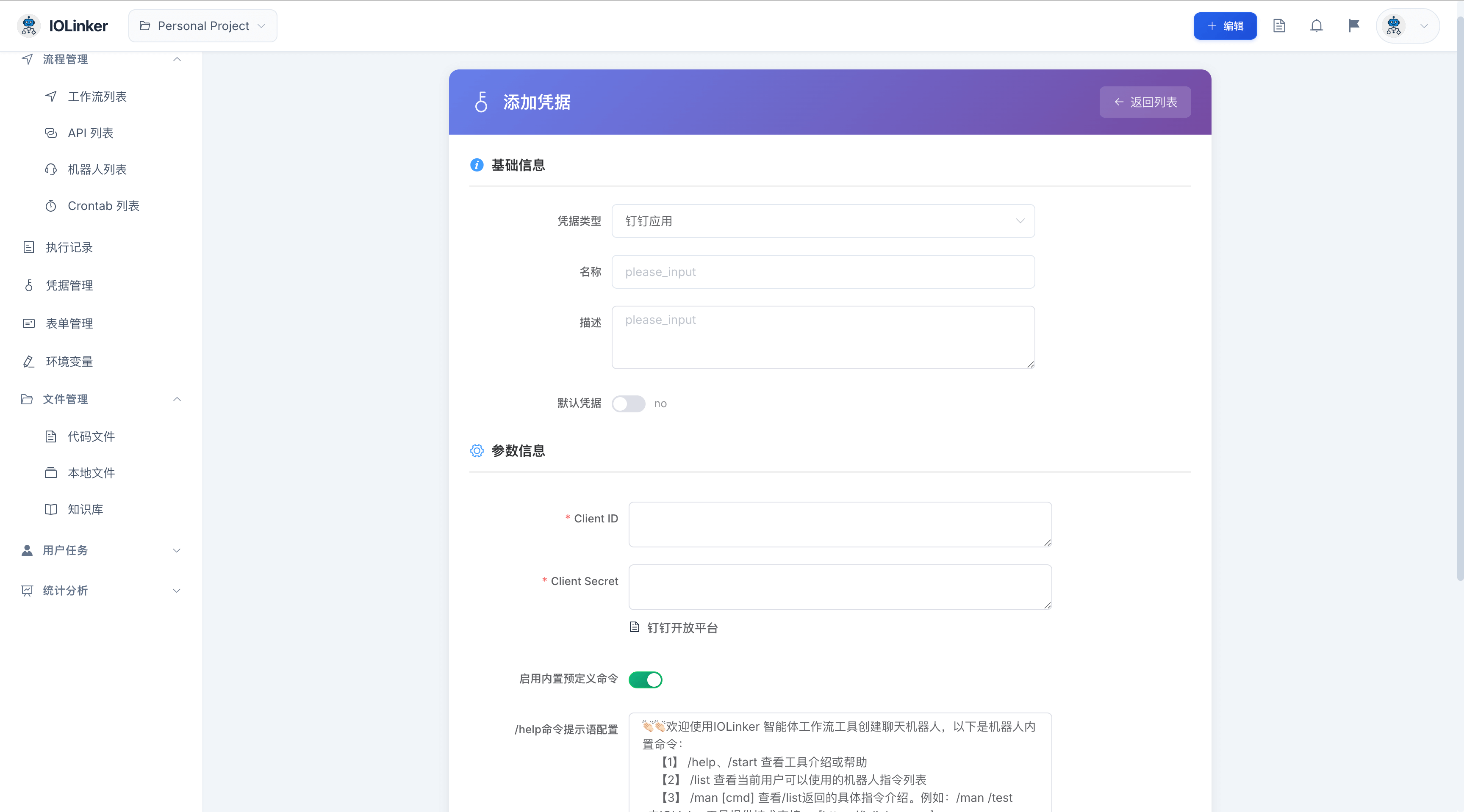
然后打开访问钉钉开发者平台 (opens new window),进入【开发者后台】点击【创建应用】。
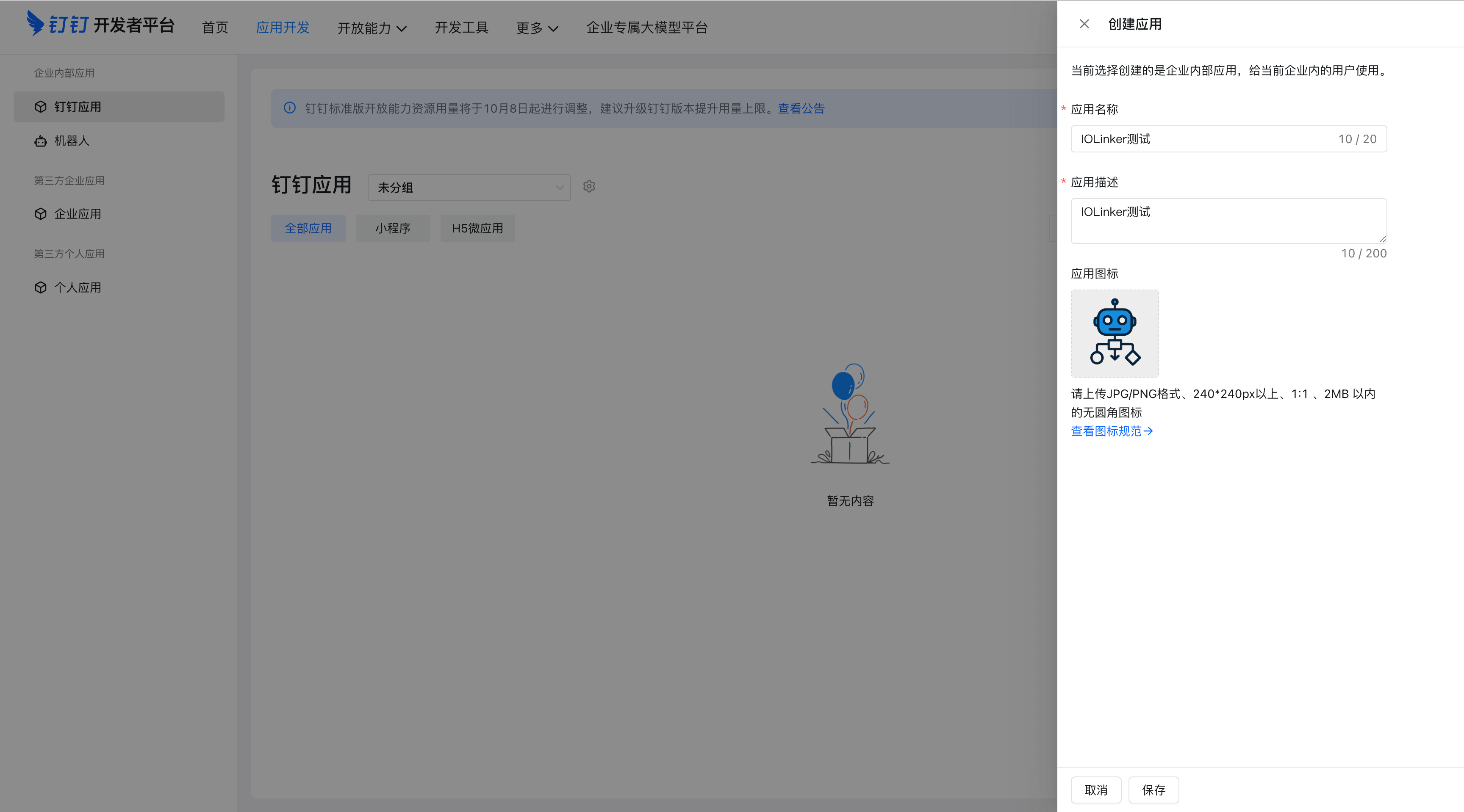
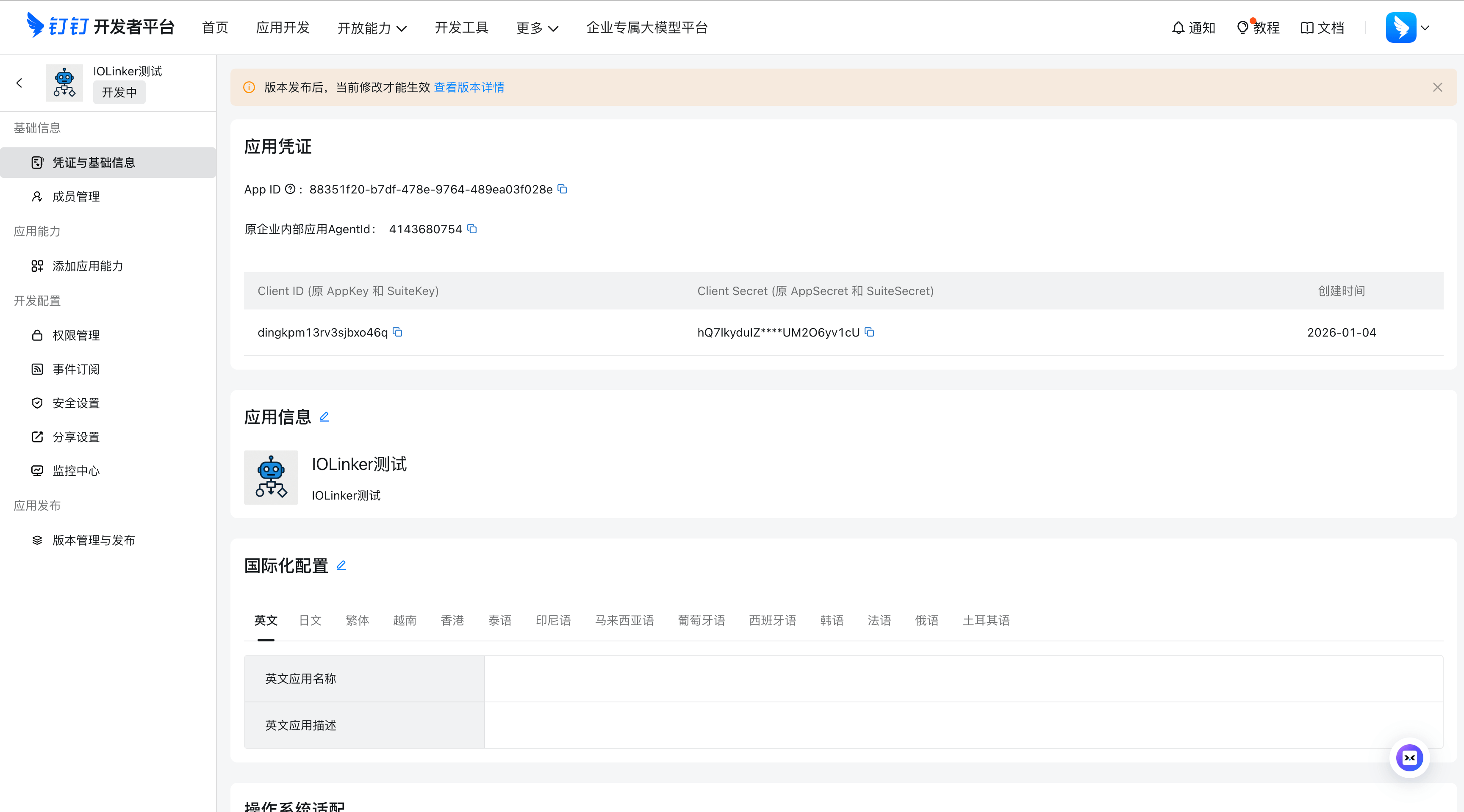
创建后会进入应用详情页面,点击【凭证与基础信息】可以看到系统分配的Client ID和Client Secret,复制到IOLinker平台保存。
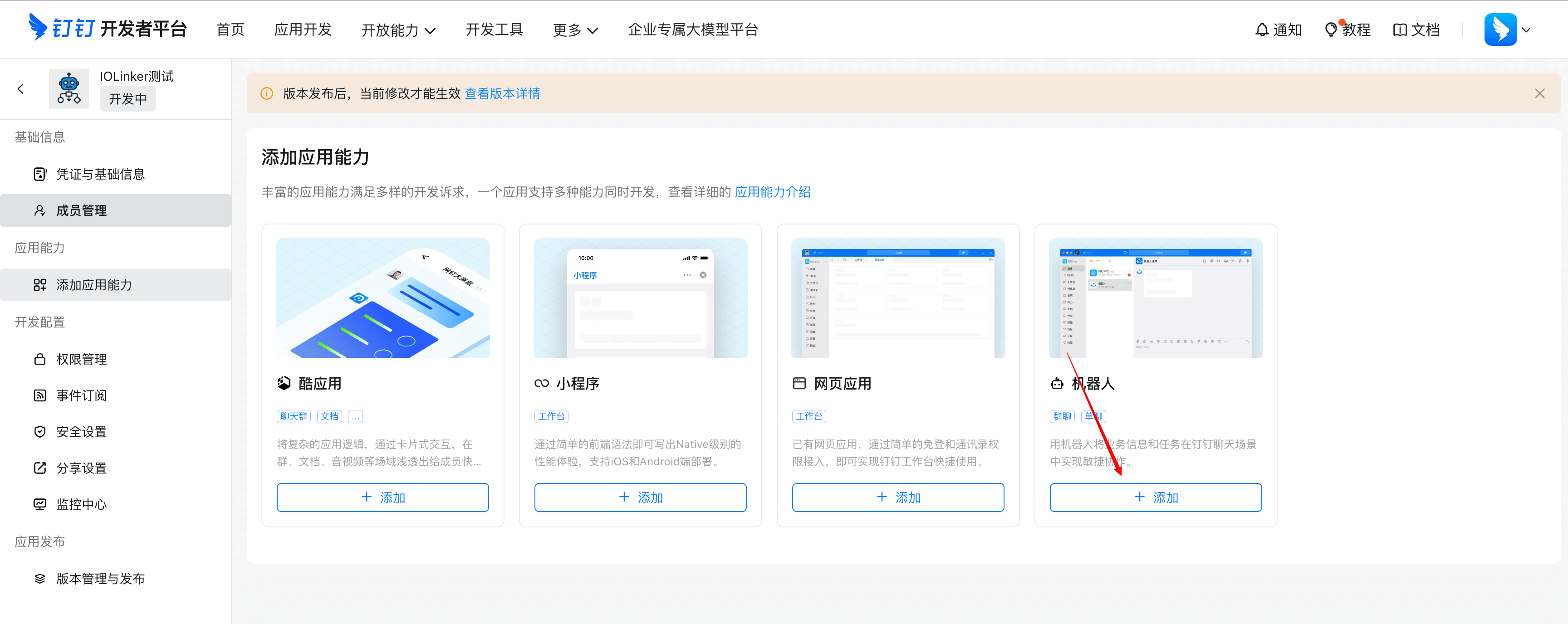
接下来,我们需要给应用添加机器人能力。
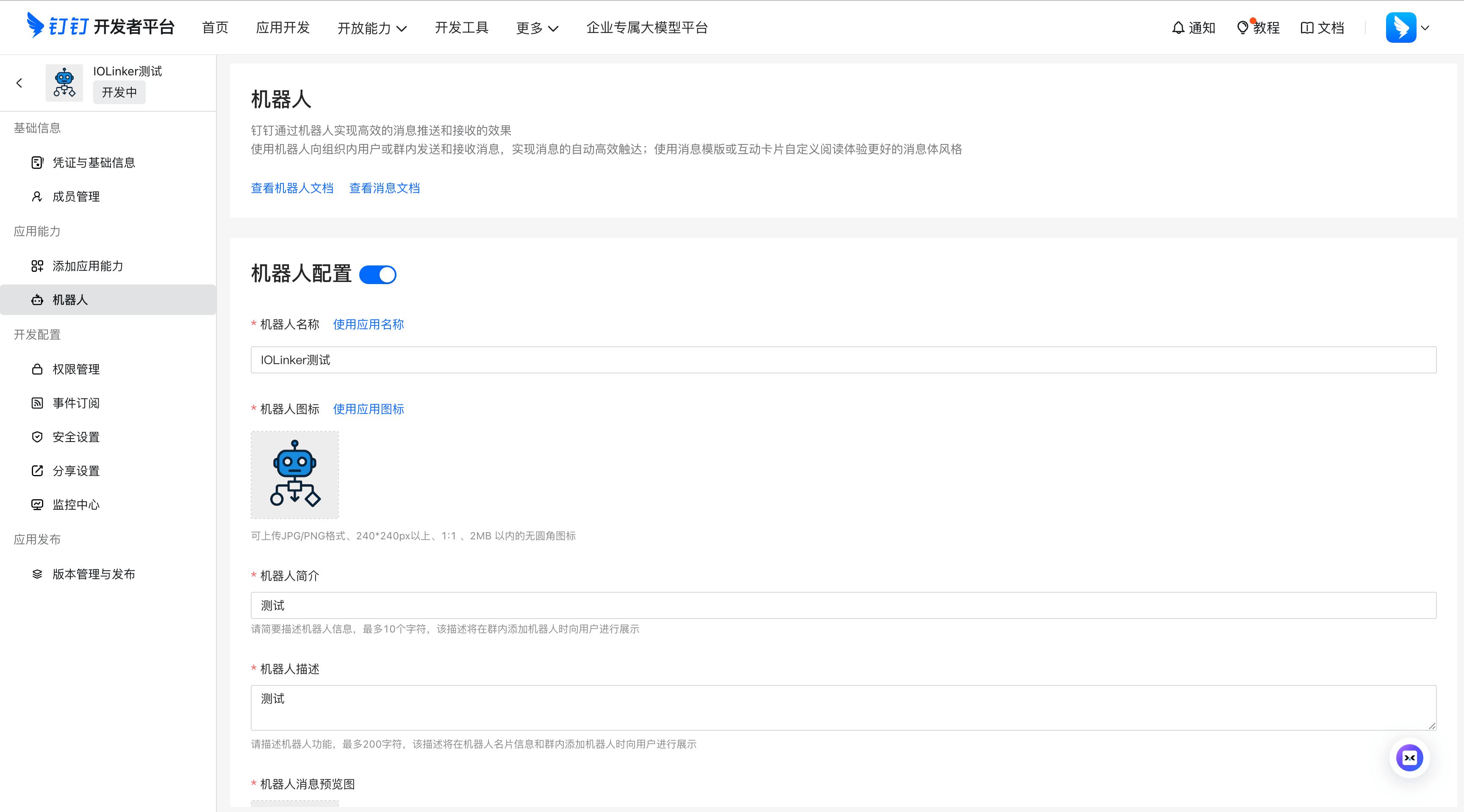
路径:【应用能力】下的【添加应用能力】,选择机器人(后续我们会通过机器人聊天窗口跟钉钉应用进行交互)。
消息接受模式,选择【Stream模式】然后保存。这种方式就不需要暴露公网地址,通过拉数据的方式获取机器人的回调消息。
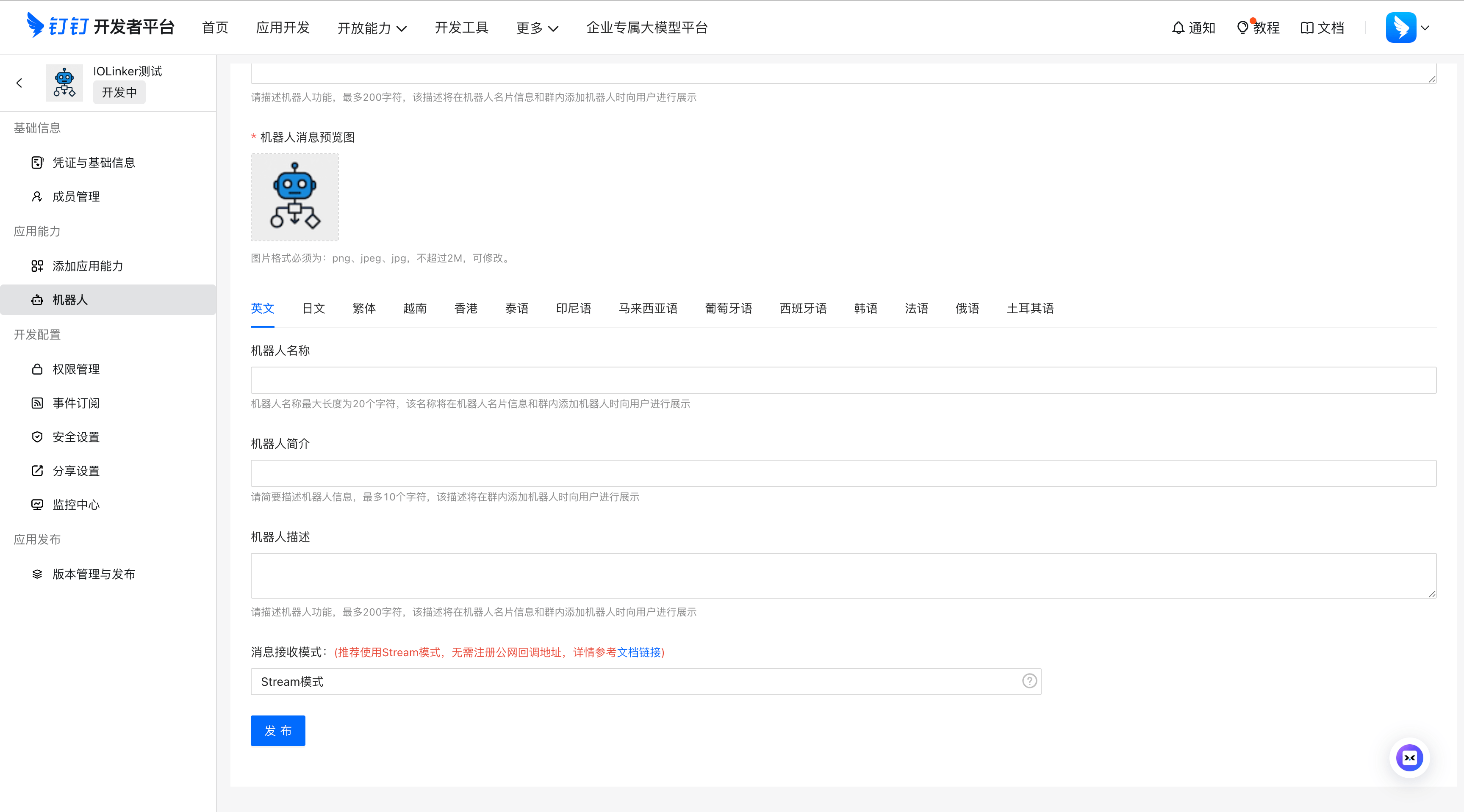
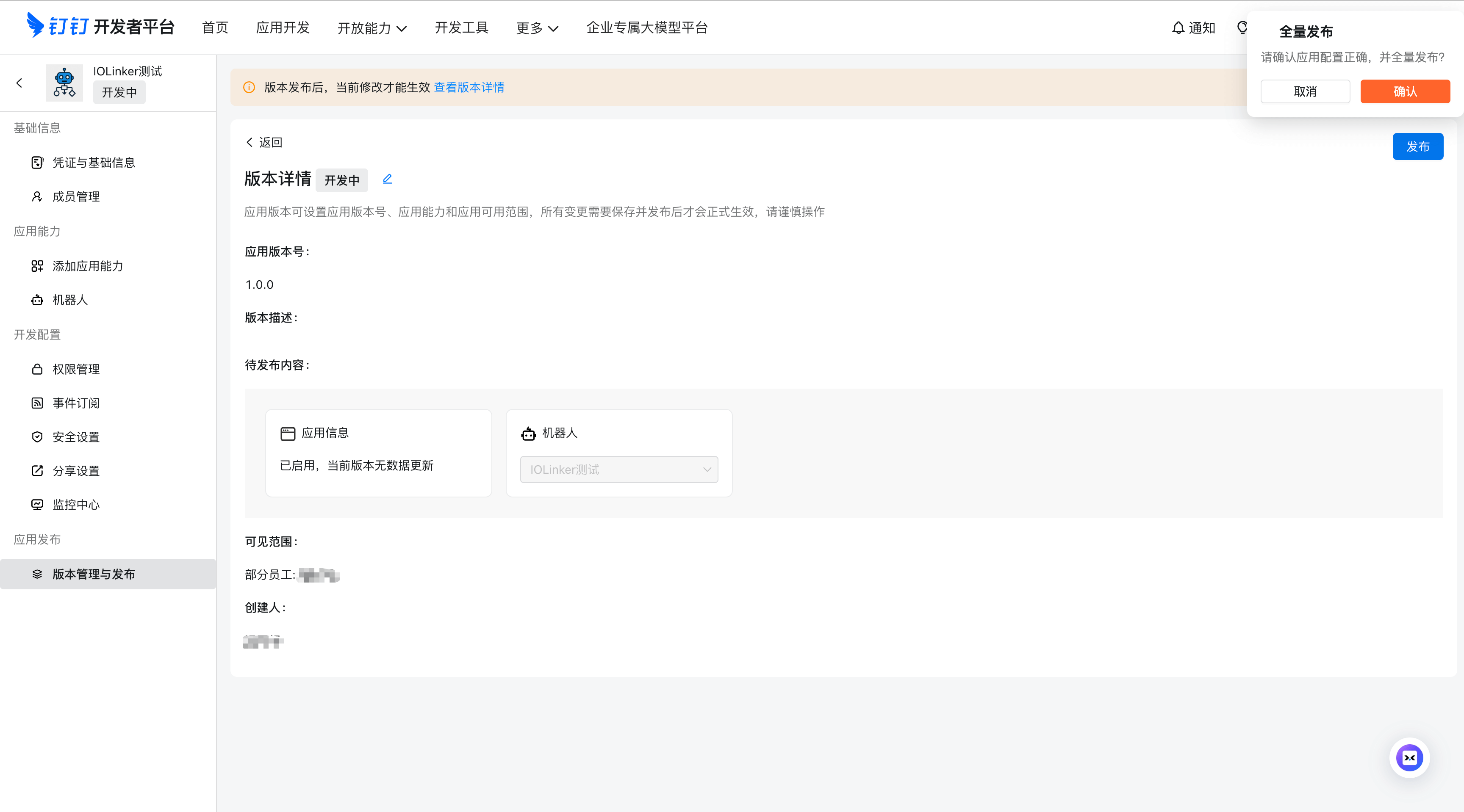
最后,点击【应用发布】下的【版本管理与发布】,设置好版本号和描述后,点击【发布】按钮即可。
前面创建好钉钉应用的凭据后,就可以在凭据处下拉选择。

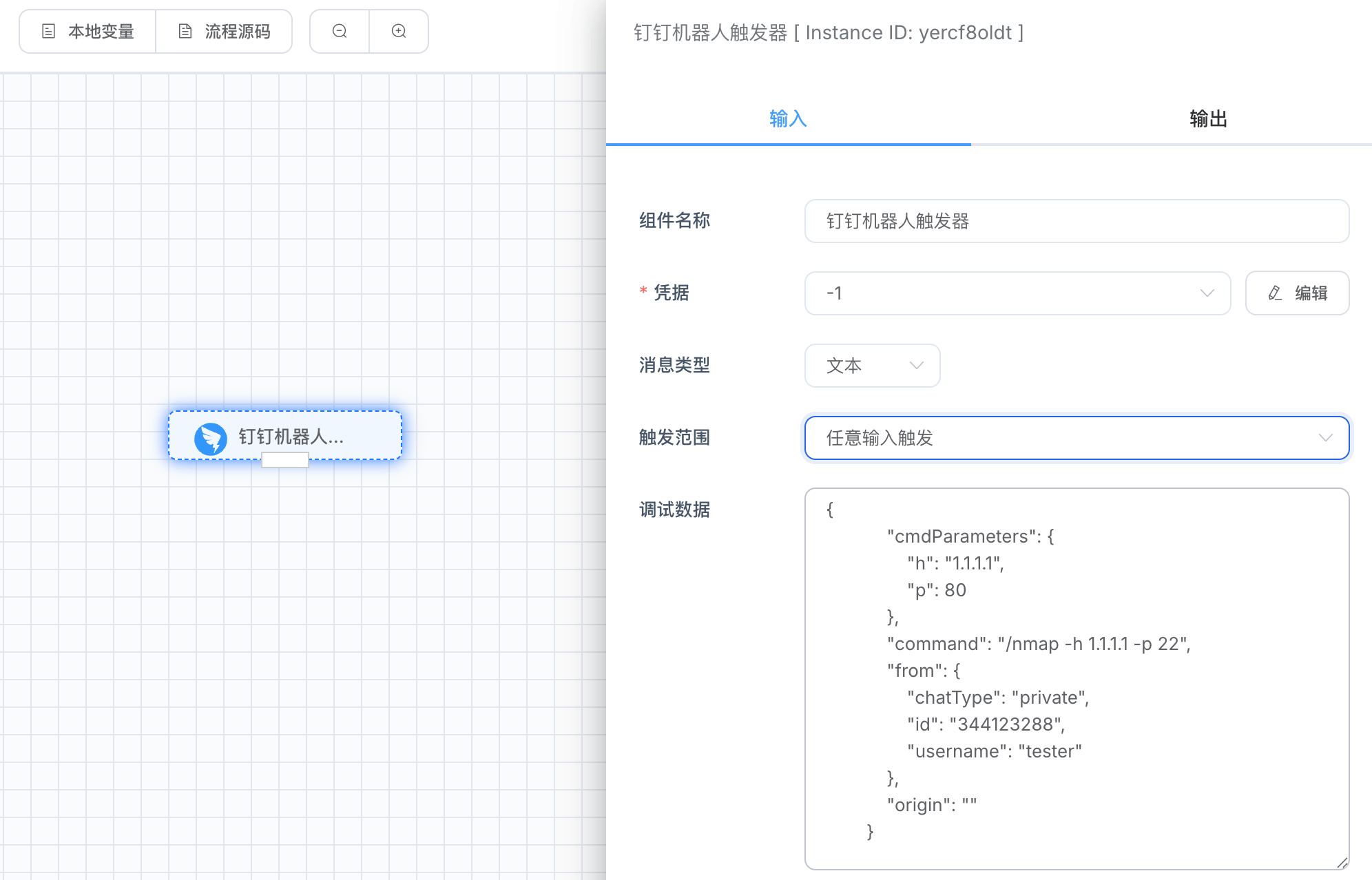
# 消息类型
消息类型目前仅支持文本类型。
# 触发范围
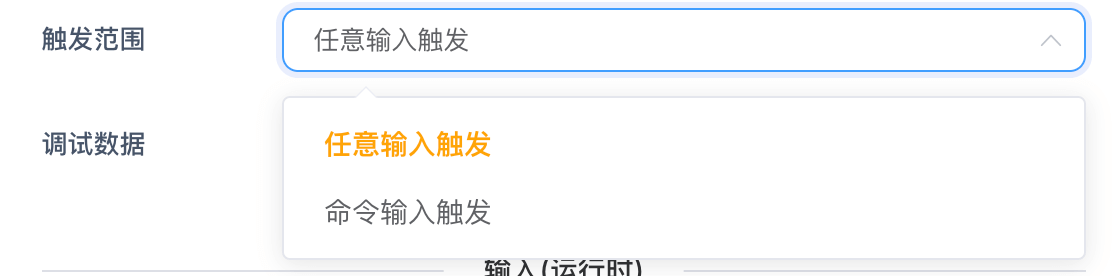
任意输入触发
这种模式,IOLinker会对用户所有的文本输入进行响应,触发工作流执行。
命令输入触发
这里可以设置指定方式触发,例如:
/nmap -h 127.0.0.1。指令方式支持解析输入的参数。
命令参数
可以设定命令及其接受的参数,例如下面设置/test命令,如果想要传参,在机器人输入窗口输入如下。系统会自动解析输出参数值。
当前支持如下几种参数类型:
- Boolean
- Integer
- Float
- String
/nmap -h 1.1.1.1应用输出如下:
{ "cmdParameters": { "h": "1.1.1.1" }, "command": "/nmap -h 1.1.1.1", "from": { "chatType": "private", "id": "34412xx", "username": "tester" }, "origin": "" }
# 调试数据
调试数据是模拟应用在运行时输出的结果,方便用户在设计工作流时调试。
# 出参
{
"cmdParameters": {
"h": "1.1.1.1",
"p": 22
},
"command": "/test -h 1.1.1.1 -p 22",
"from": {
"chatType": "private",
"id": "34412xx",
"username": "tester"
},
"origin": ""
}
cmdParameters
解析输出用户命令传参的各个参数值。
command
用户输入的完整命令
from
- chatType:private表示单聊消息、group表示群聊消息
- id:表示发送该消息的用户Telegram ID
- username:表示发送该消息的用户名称
# 如何打开创建的应用
前面创建好的应用,因为是绑定了机器人的能力。所以我们需要在一个聊天群里面,通过添加机器人的方式打开这个应用。
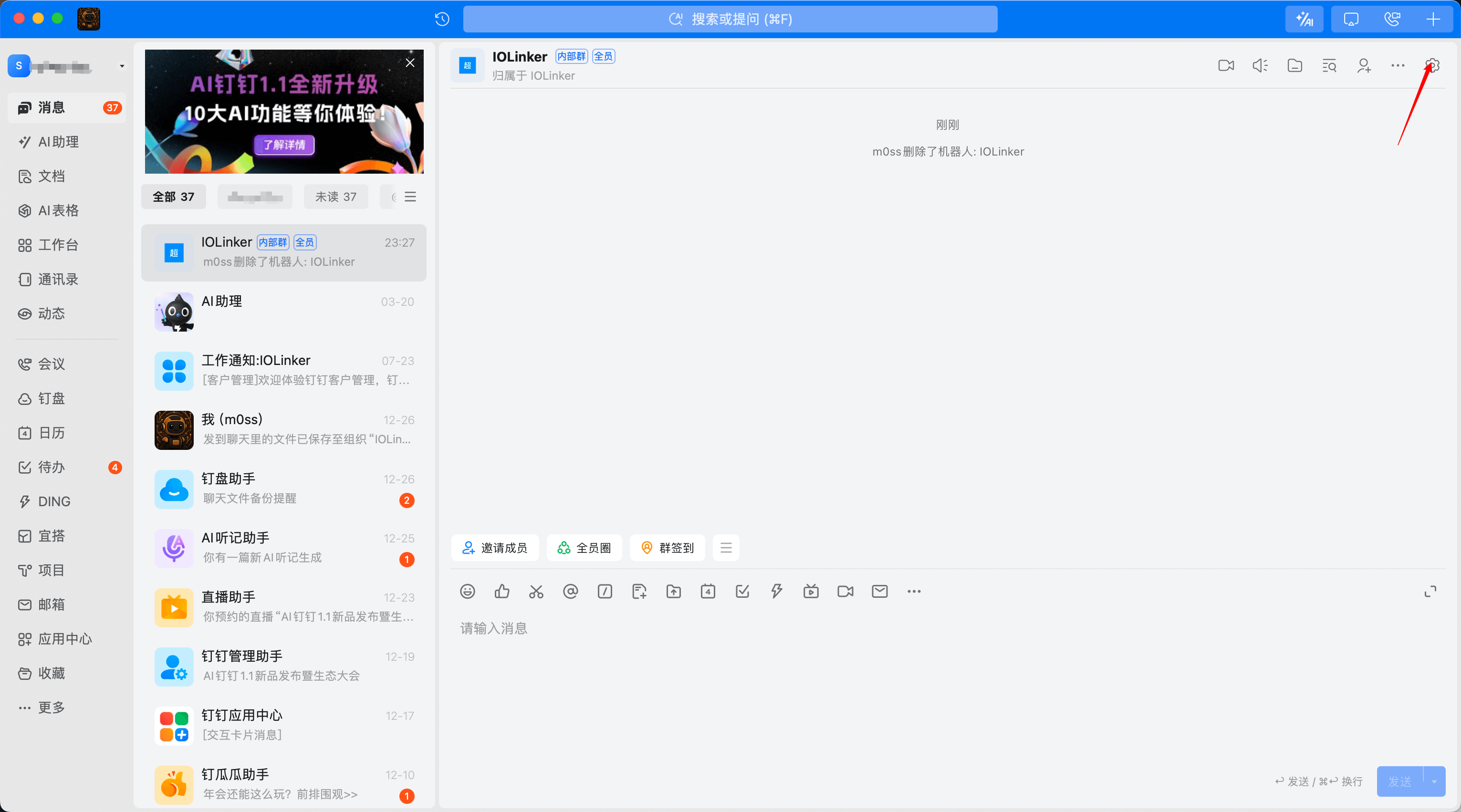
打开一个聊天群,点击右上角的群设置按钮:
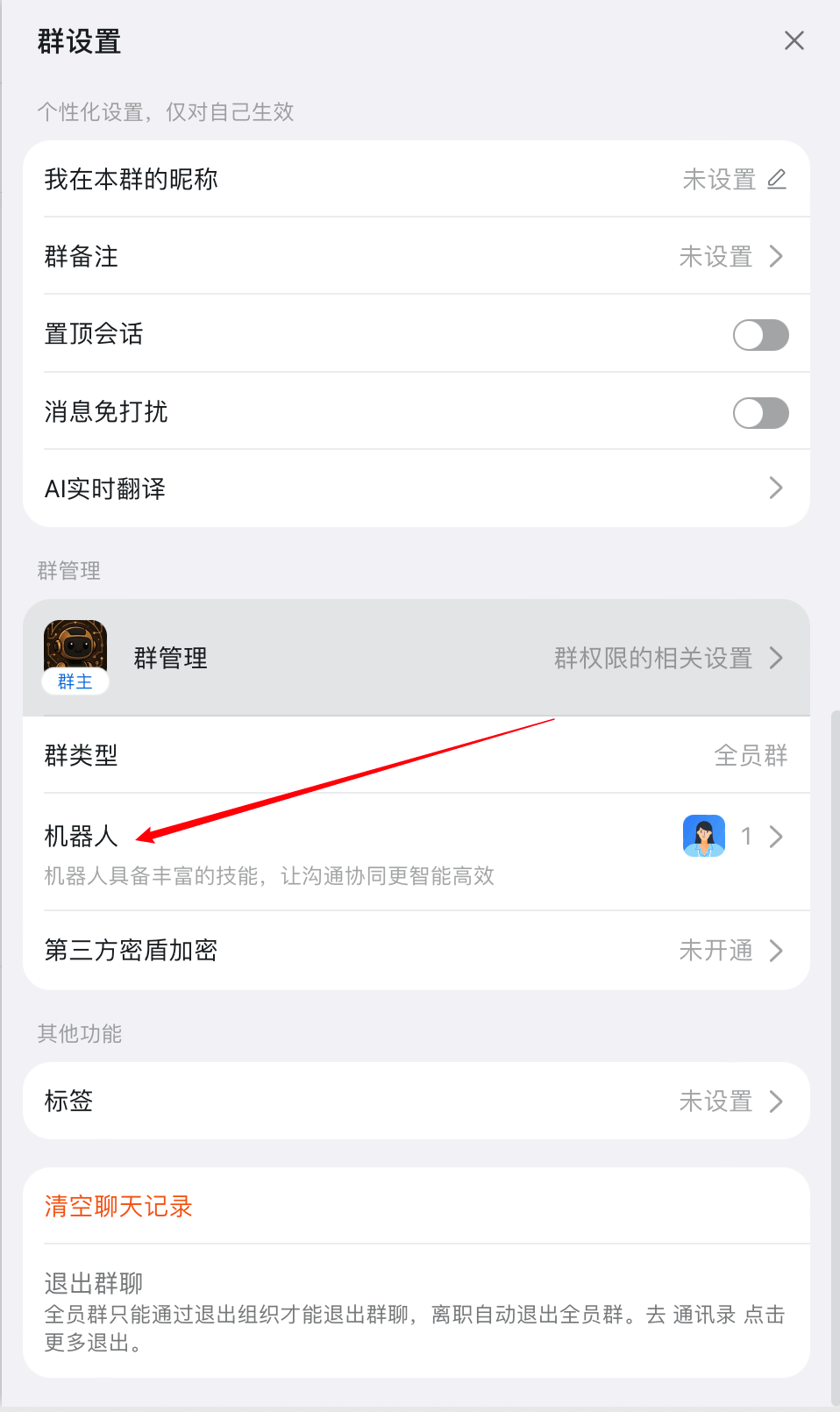
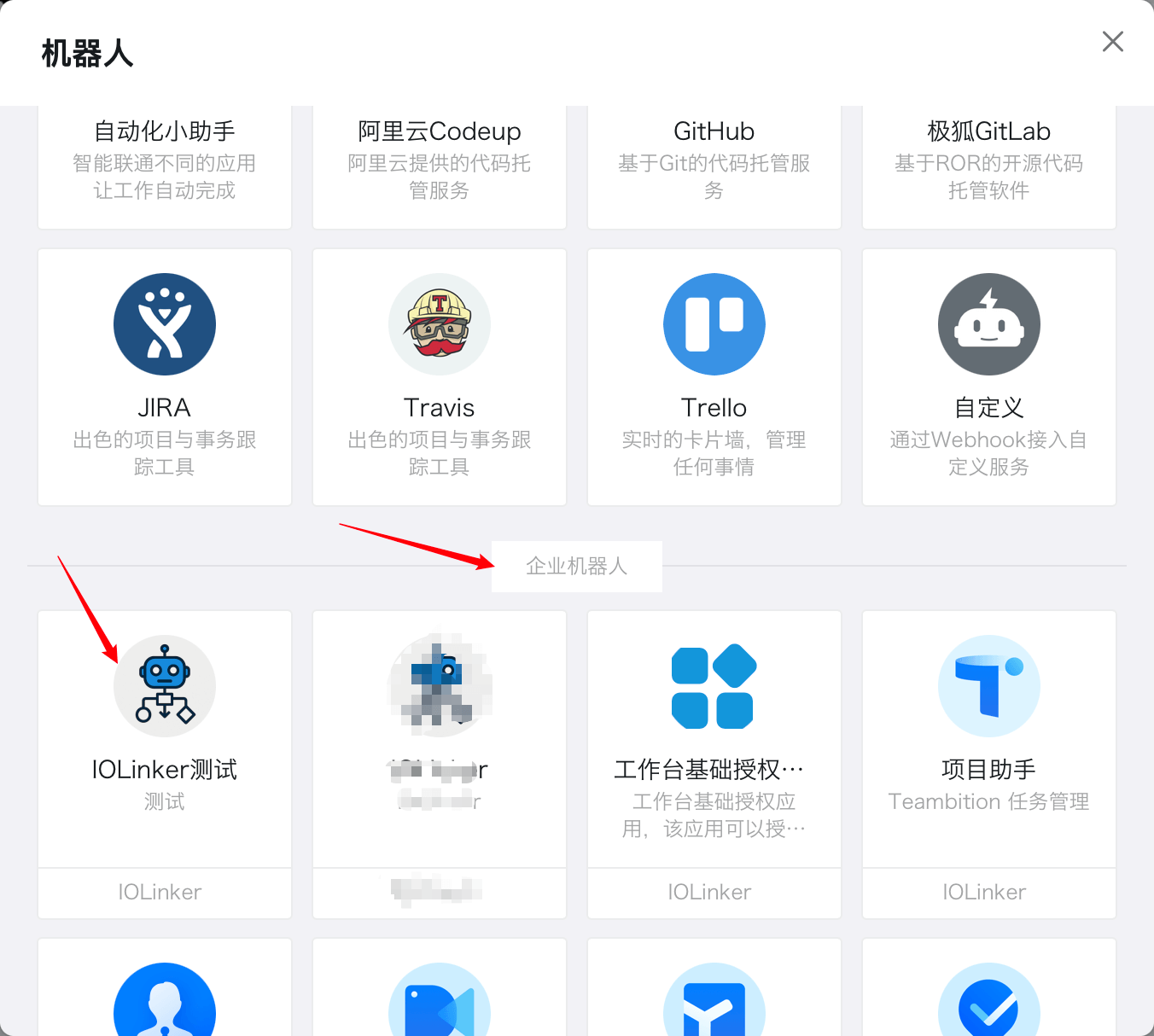
下拉到【群管理】,点击机器人,然后会显示【添加机器人】按钮,点击就可以查看到我们创建的应用(机器人)。

打开后,可以看到【企业 机器人】栏目,这里就可以看到我们创建的应用关联的机器人,点击【添加】并【完成】。
然后点击机器人的头像,点击【发消息】我们就可以跟应用(机器人)进行单聊发消息。

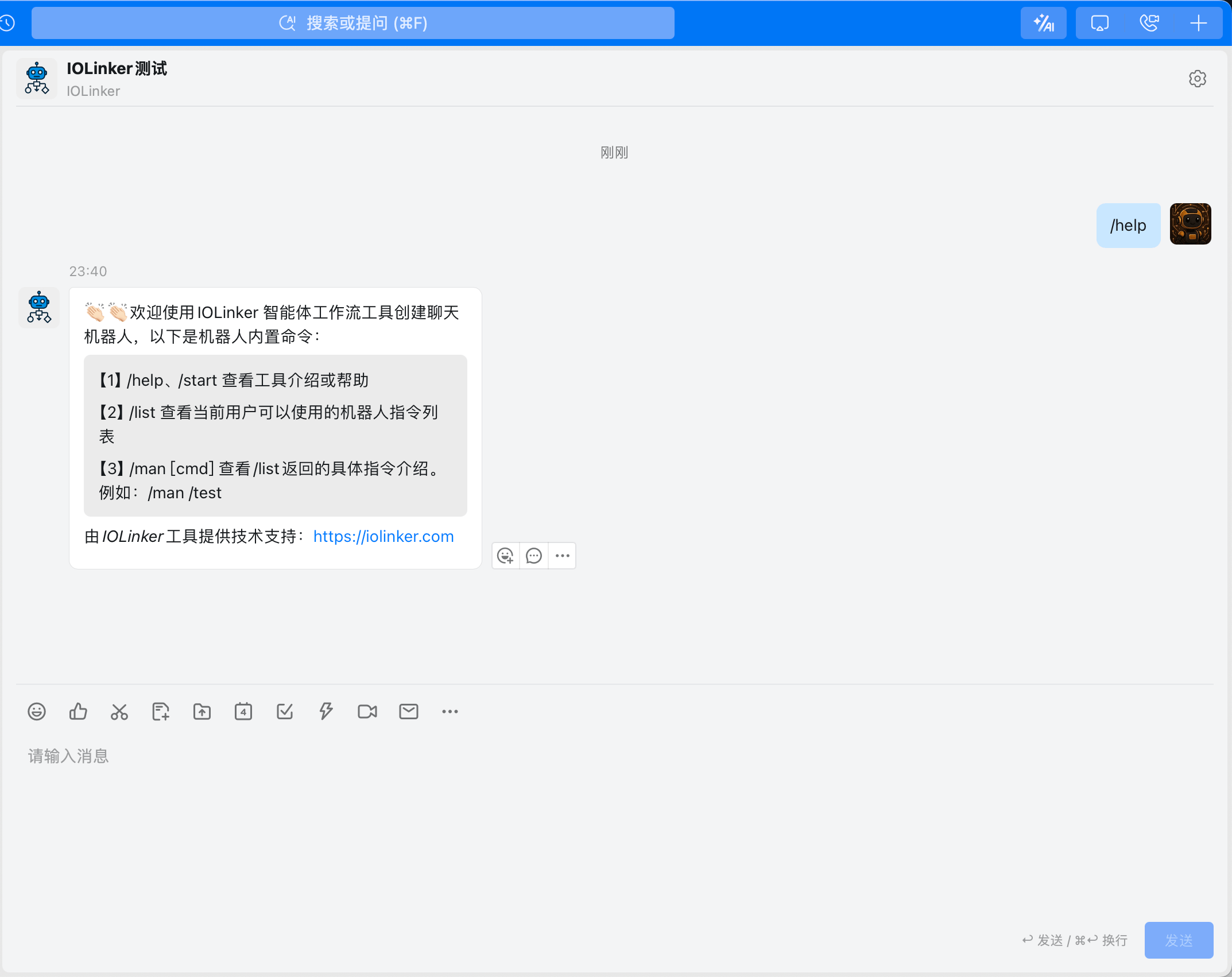
由于我们创建凭据时,启用了内置的指令,这里我们直接输入/help,就可以看到系统自带的指令。
注意:这里系统自带的几个指令不会触发工作流执行,只是用于管理查询指令用途。
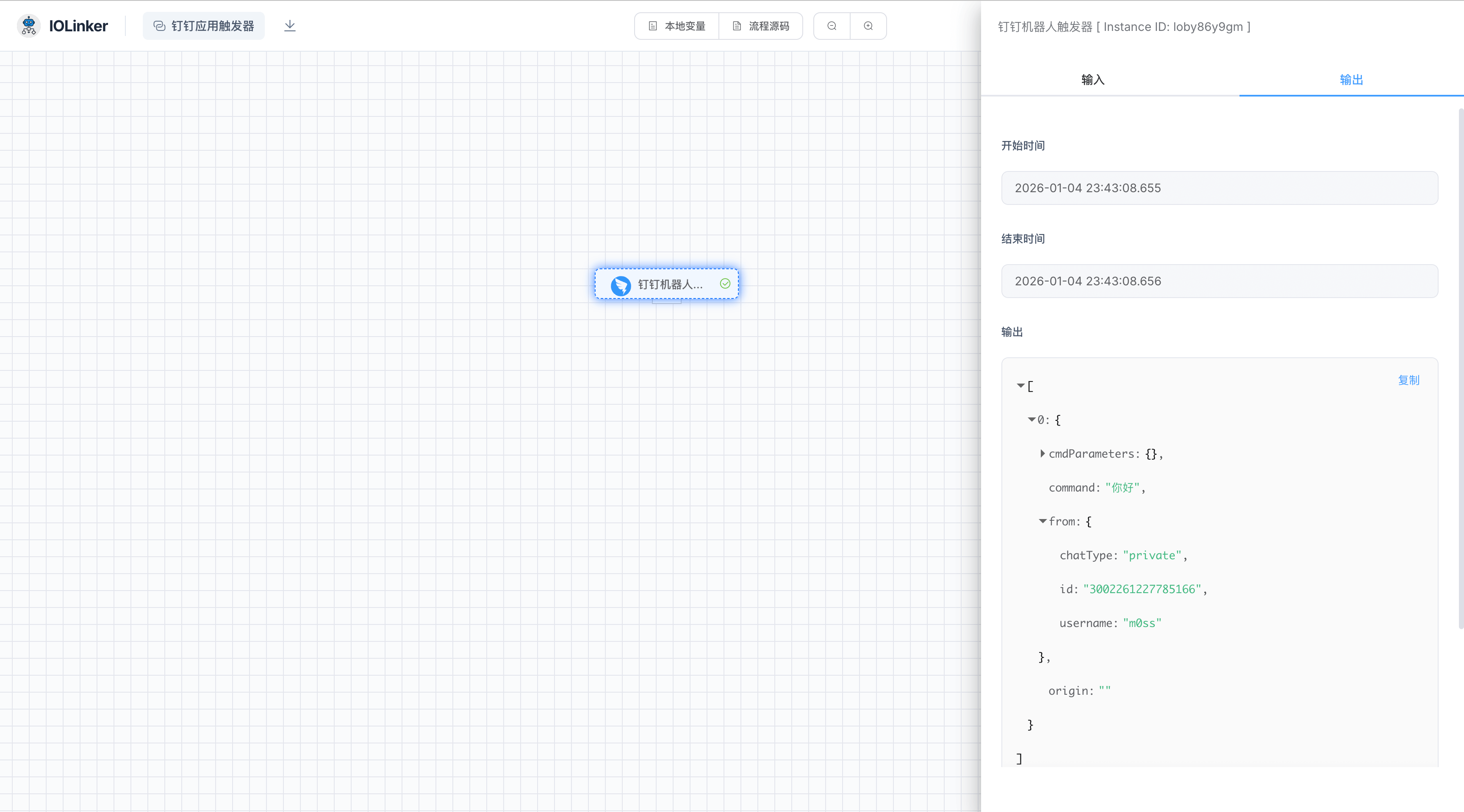
由于我们选择的触发范围是任意输入,这里我们随便输入除了系统内置指令以外的文本,都会触发工作流执行:
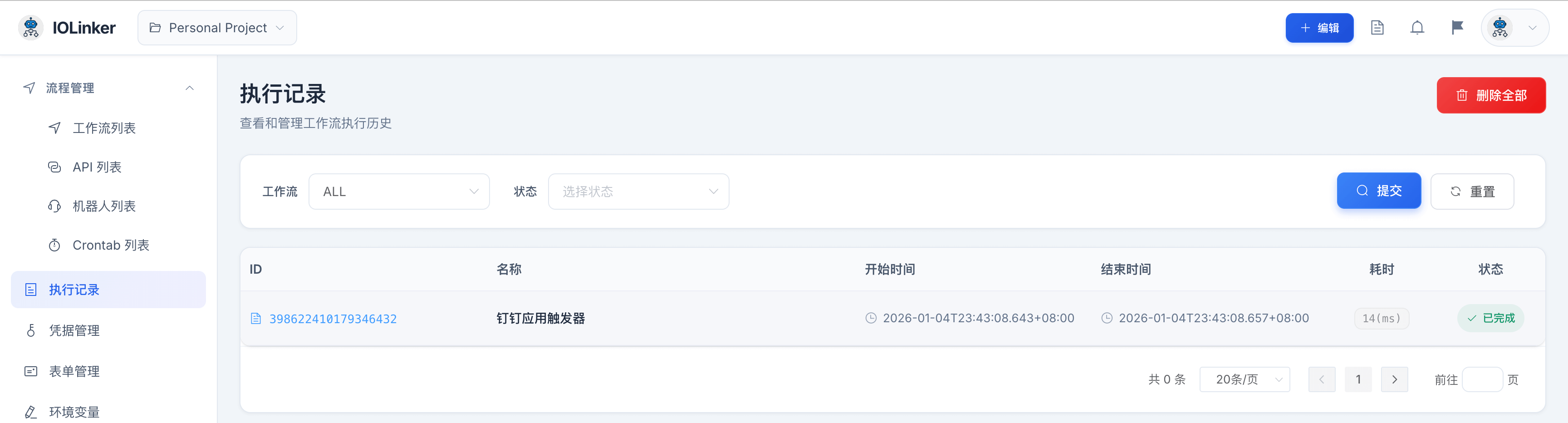
点击可以查看到具体回调的消息详情: